
AUTONOMOUS RAILWAYS MONITORING ROBOT UNTUK MEMBANTU PENGAWASAN REL KERETA API
Primary tabs
Kereta api merupakan salah satu transportasi darat yag banyak diminati masyarakat Indonesia. Di Indonesia, kereta api pertama kali beroperasi tahun 1867 tetapi baru dikelola oleh PT. KAI Persero pada tahun 1945. Dalam memberikan jasa transportasi yang baik, PT. KAI Persero memiliki banyak sarana prasarana pendukung. Untuk menjaga kualitas sarana prasarana tersebut diperlukan pengelolaan dan pemeliharaan yang rutin. Salah satu sarana prasarana tersebut adalah rel kereta api. Berdasarkan data dari situs resmi PT. KAI Persero panjang keseluruhan rel kereta api di Indonesia adalah 7.464 km. Rel kereta api tersebut dipelihara dan dikelola oleh Petugas Penilik Jalan (PPJ). Sampai saat ini, Petugas Penilik Jalan (PPJ) dalam melakukan pemeriksaan harus berjalan kurang lebih 16 km dan masih menggunakan alat manual. Dan kerusakan yang dapat terjadi pada rel, yaitu rel patah, sambungan rel, wesel rusak, bantalan rusak, rel amblas, penambat rel sudah longgar dan genjotan disambungan serta pada lengkungan
Berangkat dari masalah tersebut, mahasiswa Univeersitas Negeri Yogyakarta yang tergabung dalam tim Program Kreativitas Mahasiswa Karsa Cipta (PKM-KC) yang beranggotakan Muhammad Adi Febri Setiawan (Pendidikan Teknik Informatika S1), Rohmat Santoso (Teknik Elektronika D3), Ario Chandra Purpratama (Kimia S1) dengan dosen pembimbing Nuryake Fajaryati, S.Pd. T .,M.Pd., membuat sebuah inovasi alat bantu petugas Petugas Penilik Jalan (PPJ) rel kereta api yang di beri nama Autonomous Railways Monitoring Robot( ARMR).
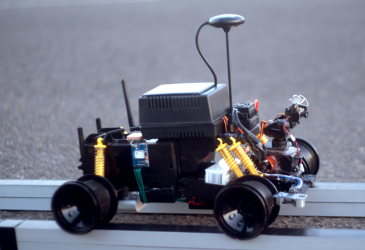
“Autonomous Railways Monitoring Robot (ARMR) terdiri dari 4 bagian, yaitu bagian utama berupa mini PC Rasberry Pi, bagian controller menggunaan perangkat kontroler ardupilot, bagian monitoring berupa sensor ultrasonik sebagai pendeteksi kerusakan rel dan kamera sebagai alat untuk melihat keadaan pada rel kereta api, dan bagian web ARMR sebagai pengendali melalui intenet dan streaming video. Autonomous Railways Monitoring Robot (ARMR) ini berbentuk seperti mobil remot, tetapi pada bannya dimodifikasi agar dapat berjalan diatas rel kereta api.” ungkap Febri.
Febri menambahkan fitur lain dari Autonomous Railways Monitoring Robot (ARMR) yaitu dapat mengirim lokasi kerusakan rel kereta yang terdeketeksi sensor menggunakan GPS. Cara kerja dari alat ini juga mudah, yaitu ARMR berjalan menyusuri rel kereta sesuai dengan titik awal keberangkatan dan titik akhir pemberhentian yang diatur melalui web, kemudian jika robot mendeteki kerusakan robot akan mengirim koordinat lokasi pada web terebut. Sehingga, petugas penilik jalan (PPJ) tidak harus menyusuri rel kereta api, tetapi hanya berada pada station pengendali. Hal tersebut diungkapnya setelah memenangkan lomba PIMUNY 2018 pada 18 Juli 2018 kemarin. (Sumber: ft.uny.ac.id)